
Page 131 - Sổ Tay Chuyên Ngành Cơ Khí
P. 131
Lắp bộ kẹp chặt lên máy bơm, nhấn ^ G lử KHC')t> NỘI BOM KHÔNG p QUAN SAT
BỎNG Hồ SO
đầu mũi đo của đồng hồ so trên bề mặt gia
công của vành khớp nối động cơ. Toàn bộ
phải được siết chặt. Điều chỉnh kim đồng
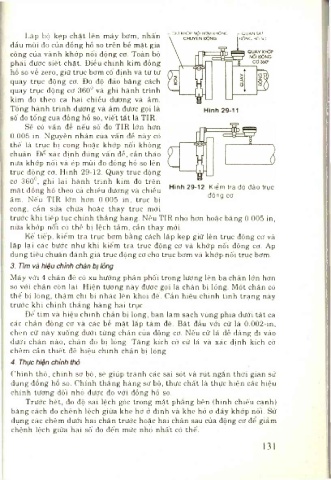
hồ so về zero, giữ trục bơm cố định và từ từ
quay trục động cơ. Đo dộ đảo bằng cách
quay trục động cơ 360° và ghi hành trình
kim đo theo cả hai chiều dương và âm.
Tổng hành trình dương và âm được gọi là Hình 29-11
số đo tổng của đồng hồ so, viết tắt là TIR.
Sẽ có vấn đề nếu số đo TIR lớn hơn
0.005 in, Nguyên nhân của vấn đề này có
thể là trục bị cong hoặc khớp nối không
chuẩn. Đẽ xác định đúng vấn đề, cần tháo
nửa khớp nối và ép mũi đo đồng hồ so lên
trục động cơ, Hình 29-12. Quay trục động
trục động cơ, Hình 29-12. Quay trục động
cơ 360°, ghi lại hành trình kim đo trên
mặt đồng hồ theo cả chiều dương và chiều Hình 29-12. Kiểm tra độ đảo trục
động cơ.
âm. Nếu TIR lớn hơn 0.005 in, trục bị
cong, cần sửa chữa hoặc thay trục mới
trước khi tiếp tục chỉnh thẳng hàng. Nếu TIR nhỏ hơn hoặc bằng 0.005 in,
nứa khớp nôi có thế bị lệch tâm, cần thay mới.
Kế tiếp, kiểm tra trục bơm bằng cách lắp kẹp giữ lên trục động cơ và
lặp lại các bước như khi kiểm tra trục động cơ và khớp nối động cơ. Áp
dụng tiêu chuẩn đánh giá trục động cơ cho trục bơm và khớp nối trục bơm.
3. Tìm và hiệu chình chân bị lỏng
Máy với 4 chân đế có xu hướng phân phối trọng lượng lên ba chân lớn hơn
so với chân còn lại. Hiện tượng này được gọi là chân bị lỏng. Một chân có
thể bị lỏng, thậm chí bị nhấc lên khỏi đế. Cần hiệu chỉnh tình trạng này
trước khi chỉnh thẳng hàng hai trục.
Đế tim và hiệu chỉnh chân bị lỏng, bạn làm sạch vùng phía dưới tất cả
các chân động cơ và các bề mặt lắp tấm đế. Bắt đầu với cữ lá 0.002-in,
chèn cữ này xuống dưới từng chân cùa động cơ. Nếu cữ lá dễ dàng đi vào
dưới chân nào, chân đó bị lỏng. Tăng kích cỡ cữ lá và xác định kích cỡ
chêm cần thiết đế hiệu chỉnh chân bị lỏng.
4. Thực hiện chỉnh tíìô
Chỉnh thô, chinh sơ bộ, sẽ giúp tránh các sai sót và rút ngắn thời gian sử
dụng đồng hồ so. Chinh thẳng hàng sơ bộ, thực chất là thực hiện các hiệu
chỉnh tương dối nhỏ được đo với đồng hồ so.
Trước hết, do độ sai lệch góc trong mặt phẳng bên (hình chiếu cạnh)
bằng cách đo chênh lệch giữa khe hd à dỉnh và khe hở ở đáy khớp nối. Sử
dụng các chêm dưới hai chân trước hoặc hai chân sau của dộng cơ để giảm
chênh lệch giữa hai số đo đến mức nhỏ nhất có thể.
131